Category: Technology
Posts that are tech related
-
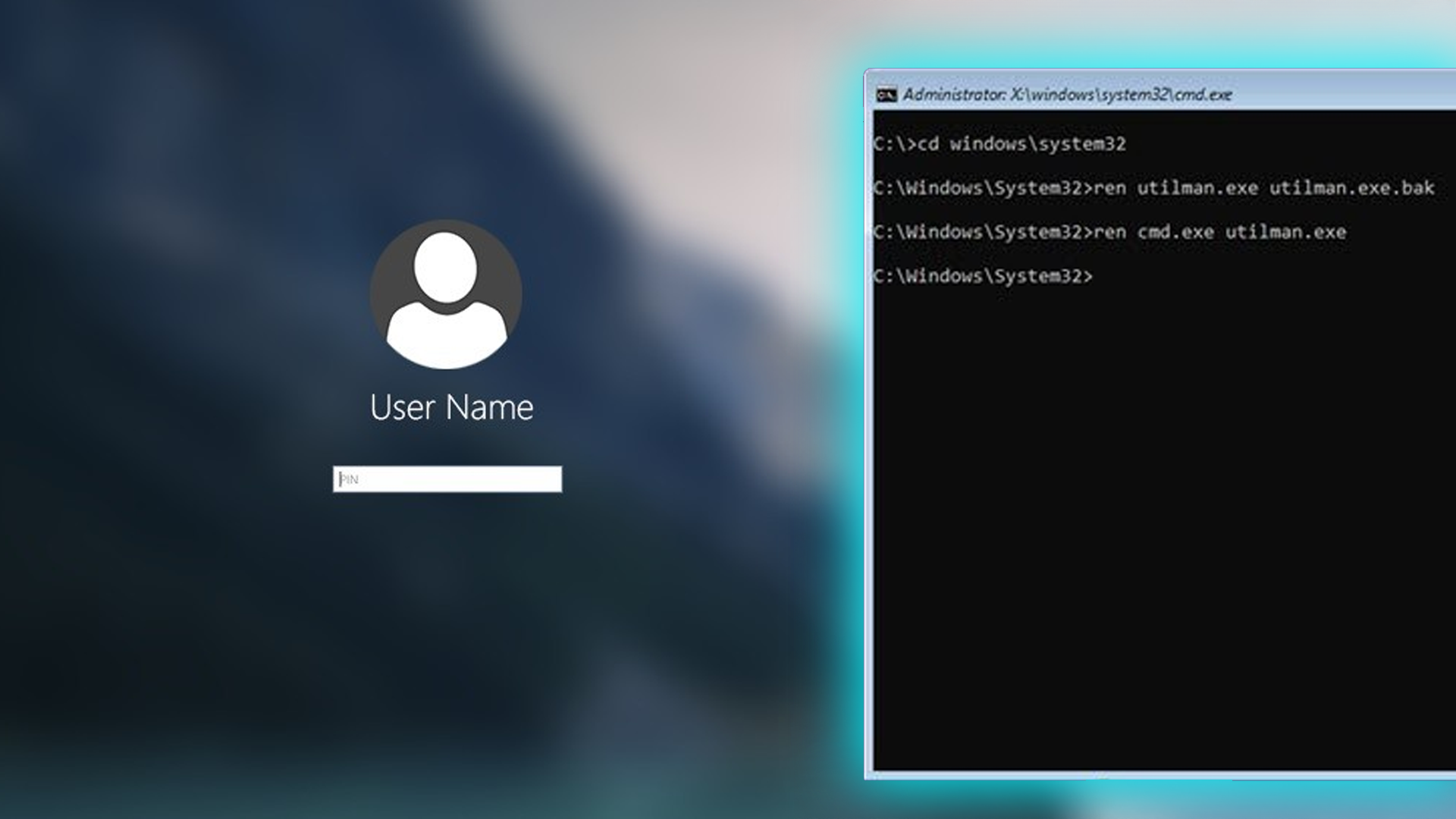
Bypassing Windows Login
I recently helped a friend with a laptop that had a forgotten password and had been locked out. I learned a new way of bypassing the basic Windows login with little effort.
-
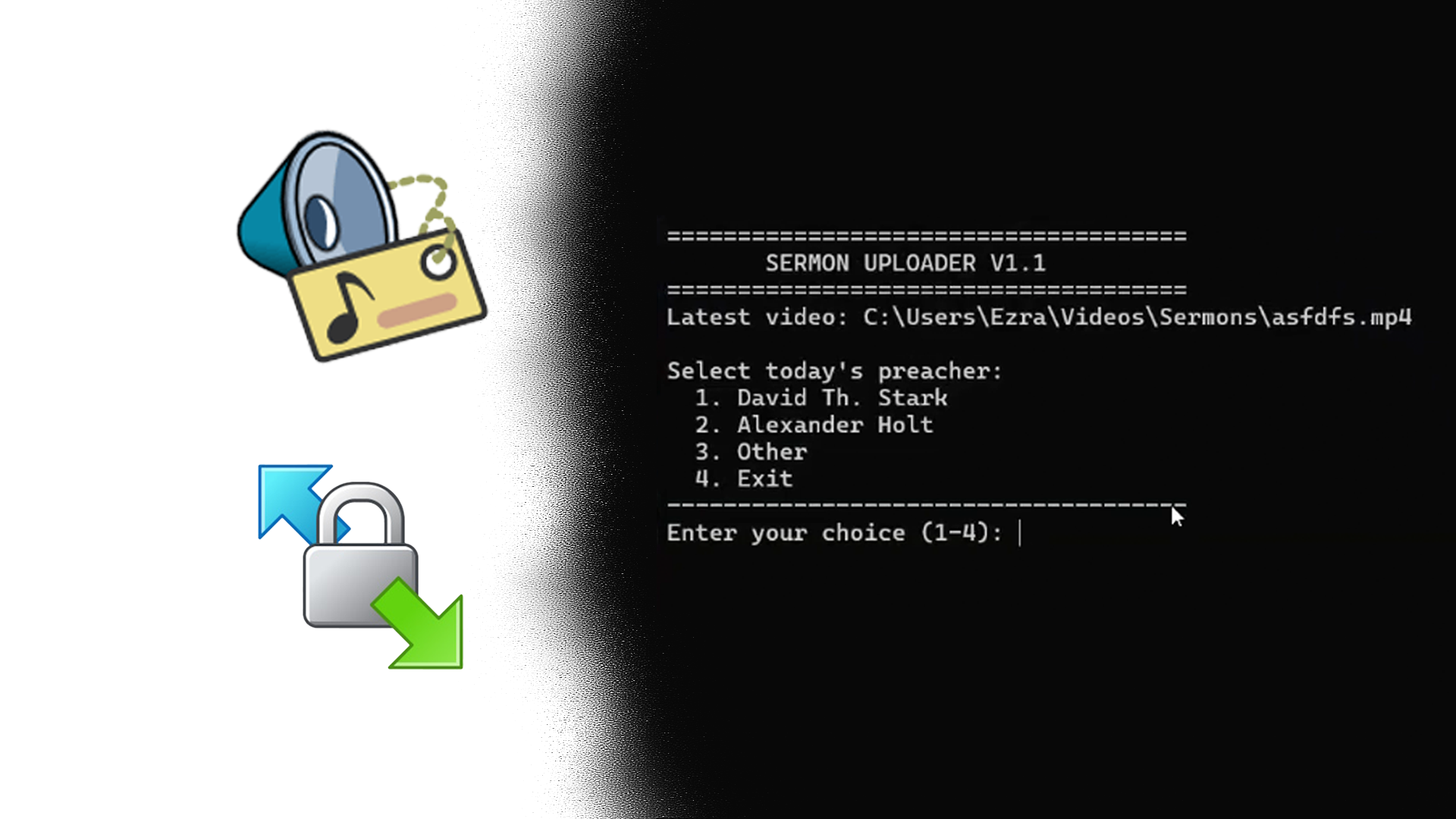
Automating video uploads
In my never-ending efforts to simplify/automate the process for my Church’s A/V behind its Live streams and slideshows. I have struggled with uploading to the various video hosting platforms for its sermons. SermonAudio’s primary purpose is to host Sermons. However, as of 2019, they have added the streaming features we use to stream and re-distribute…
-
Reusing a Desktop as a Home Console
With my move away from my older budget desktop build to my more recent Macbook Pro. I installed a fresh copy of Linux to keep it alive and spun up some local servers for the house; a couple of the servers I spun up are Home Assistant, and combined with some smart outlets, I could…
-

Creating Documentation for Projects
With taking on more projects that involve more than just myself, I’ve been working on writing documentation to share the knowledge around a project and store information with relevant tips to the project I’m working on. While searching for a somewhat easy-to-configure, preferably free solution to documentation hosting, I came across Read the Docs. Read…